
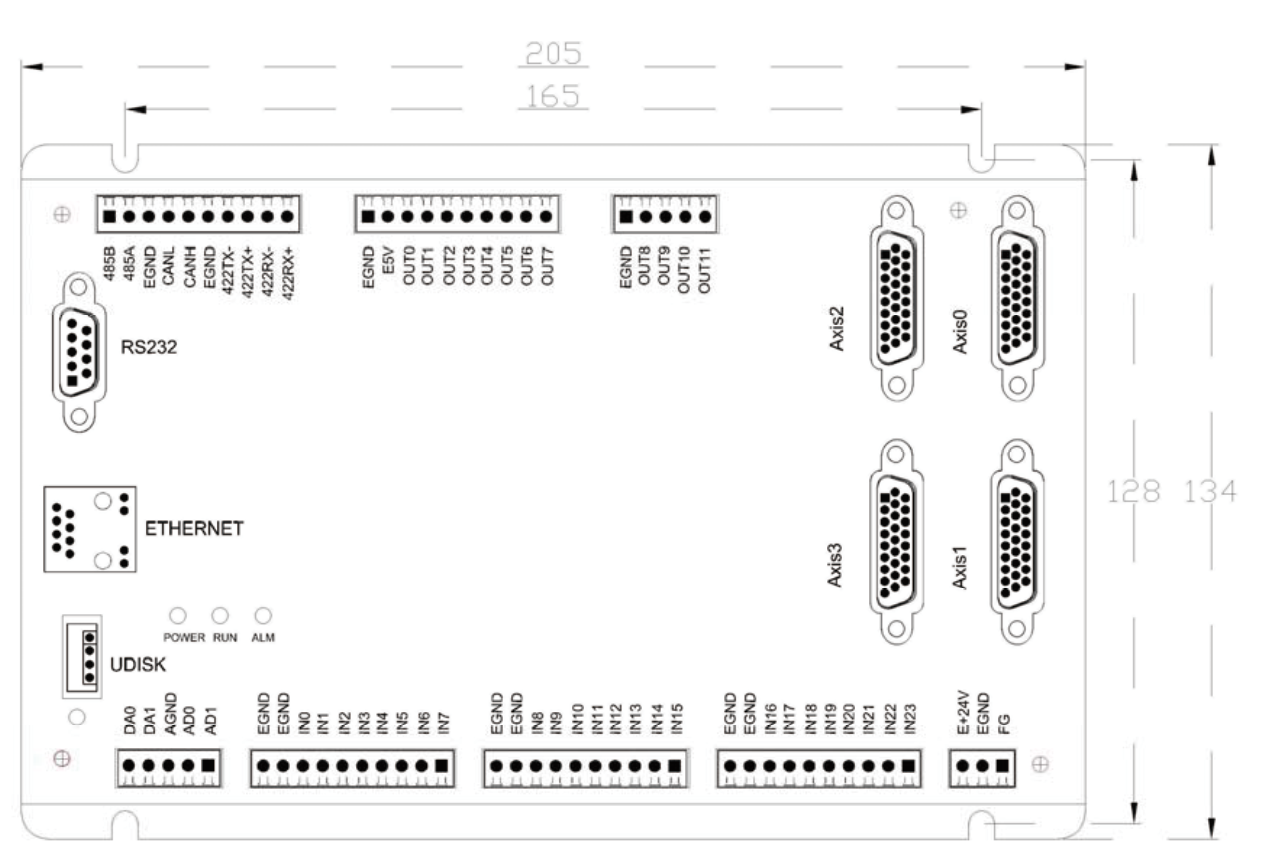
The MCN411P is a stand-alone controller that controls the motion of 4-axis motors. The pulse axis output mode supports direction/pulse or double pulse, supports encoder position measurement, and can be configured for handwheel input mode. 24 digital inputs and 12 digital outputs (with overcurrent protection). With CAN, RS485 bus, expandable 512/512/256/128 input\output\AD\DA, support Basic multi-tasking programming, 6 tasks, 10 files, so that program developers can easily write programs.
MCN411P supports up to 12-axis linear interpolation, arbitrary circular interpolation, space arc, helical interpolation, electronic cam, electronic gear, synchronous follow-up, virtual axis setting, etc. Real-time motion control with optimized network communication protocol . Up to 256 MCN411P controllers can be linked simultaneously on a single computer.
| Performance | Motor shaft | 4 axes |
| Maximum number of extended axes | 12 axes | |
| Basic axis type | Pulse output, all axes with encoder | |
| Number of pulses | 32 | |
| Encoder bits | 32 | |
| Speed acceleration bits | 32 | |
| Pulse highest frequency | 10MHz | |
| Number of motion buffers per axis | 128 | |
| Array space | 160000 | |
| Program space | 2000KByte | |
| FLASH space | 128MByte | |
| Built-in I/O | 24VDC input | 24 |
| 24VDC output | 12 (with overcurrent protection) | |
| On-axis IO | 1 input and 1 output/axis (in-axis output can only be enabled) | |
| Extended I/O | Digital I/O points | 512 in 512 out |
| 12bit 0-10V analog input | 256 | |
| 12bit 0-10V analog output | 128 | |
| Communications | RS232,RS485,RS422, Ethernet, U disk,CAN, | |
| Basic | Support | |
| Program | Number of programs | 6 |
| Number of tasks | 10 | |
| PLC language | Support | |
| Robotic forward/backward kinematics | Support | |
| Configuration | Support | |
| G-code | Expandable | |
| Debugging software | YKDevelop | |
| Operating environment | 0~45 ℃ | |
| Power requirement | 24V DC input (within 10W power consumption, no need fan cooling) | |
| Dimensions | 205*134 mm | |
| PMC100-ZDJ | 制袋机控制器 |